Сьогодні не викликає сумніву необхідність використання систем відеоспостереження в якості складової інтегрованих комплексів охорони периметрів. З практики близько 90% об’єктів, що оснащуються периметральною сигналізацією, мають в більшій чи меншій мірі й елементи відеонагляду (10%, що залишились, зазвичай дооснащуються камерами та відповідною інфраструктурою впродовж перших трьох років експлуатації).
Оскільки робота будь-якого периметрального детектору базується на балансі вірогідностей фіксації вторгнень та генерації хибних тривог, класичні рішення передбачають застосування відеозображень в якості подієвого підтвердження ситуації на об’єкті: тобто оператор, отримавши інформацію про подію, має можливість «вручну» верифікувати її та активувати відповідний план контрзаходів. Таким чином, глибока інтеграція підсистем детекції і відеонагляду дозволяє значно знизити навантаження на персонал, репрезентуючи відповідальним співробітникам тільки релевантні до конкретної події зображення. Всі інші канали приховані, проте знаходяться в режимі постійного запису.

Приблизно з середини 00-х років в індустрії безпеки почалися дослідження щодо оптимізації найбільш слабкої ланки логіки відпрацювання подій в системах охорони периметру: верифікації тривог людиною. Почалися пошуки технічних варіантів надання системам можливості не тільки «відчувати» (тобто фіксувати вторгнення за допомогою сенсору), а й «бачити» (оцінювати візуальну обстановку в зоні під охороною на предмет джерела тривожної події – людини, транспорту, кліматичного чи техногенного фактору). Ранні експерименти з алгоритмами відеоаналітики та маркетинговий шум, що здійняли деякі продавці навколо цього питання, обіцяючи вже зараз замінити системами відеоспостереження всі напрацювання в області сенсорів на інших фізичних принципах, зіграли злий жарт. Серйозні замовники, спробувавши якість роботи тогочасних аналітичних продуктів і оцінивши відношення пропущених і хибних тривог, надовго відмовились впроваджувати такі рішення, віддавши перевагу класичній інтеграції з подієвим відеопідтвердженням.
За майже 20 років, що минули з часу появи перших комерційно доступних розробок в галузі відеоаналітики, математичні моделі обробки відеоряду зробили гігантський крок уперед. Не в останню чергу це було зумовлено появою більш досконалих і потужних апаратних засобів обчислення, просунутих статистичних алгоритмів, що лежать в основі навчання застосунків штучного інтелекту, а також необхідних для цього баз даних реферальних зображень. Однак, всупереч раннім сподіванням дослідників, відеоаналітика все ще не в змозі замінити собою традиційні оптико-електронні, мікрохвильові чи вібраційні сенсори. При цьому, її застосування вже може відчутно підвищити ефективність їх використання. Дана стаття покликана на реальних прикладах показати шляхи і механізми впровадження аналітичних інструментів в нові чи існуючі комплекси охорони периметрів, що може надати додаткової цінності функціонуванню системи в цілому, а не виконувати функцію чергової маркетингової «іграшки».

Отже, наріжним каменем сучасних аналітичних продуктів є можливість виділення об’єктів у відеоряді та їх класифікація.До об’єктів, які становлять найбільший інтерес для експлуатації систем охорони периметрів, можна віднести людину, тварин та транспортні засоби, які можуть бути охарактеризовані додатковими підкласами.
Подальша обробка зображень зазвичай вкладається в набір правил, тригером для яких є поява класифікованого об’єкту в кадрі. Серед них: напрямок переміщення, підрахунок кількості об’єктів, їх зупинка, час проведений в зоні під охороною і т.д.
Відпрацювання певного правила, в свою чергу, призводить до заданої програмованої реакції. Такою реакцією може бути, наприклад, запуск аналізу показників інших периметральних сенсорів для прийняття рішення про видачу тривожного сигналу, підлаштування чутливості периметральних сенсорів в залежності від класу об’єкту тощо.
Схематично загальна модель роботи відеоаналітики представлена на Мал. 1:
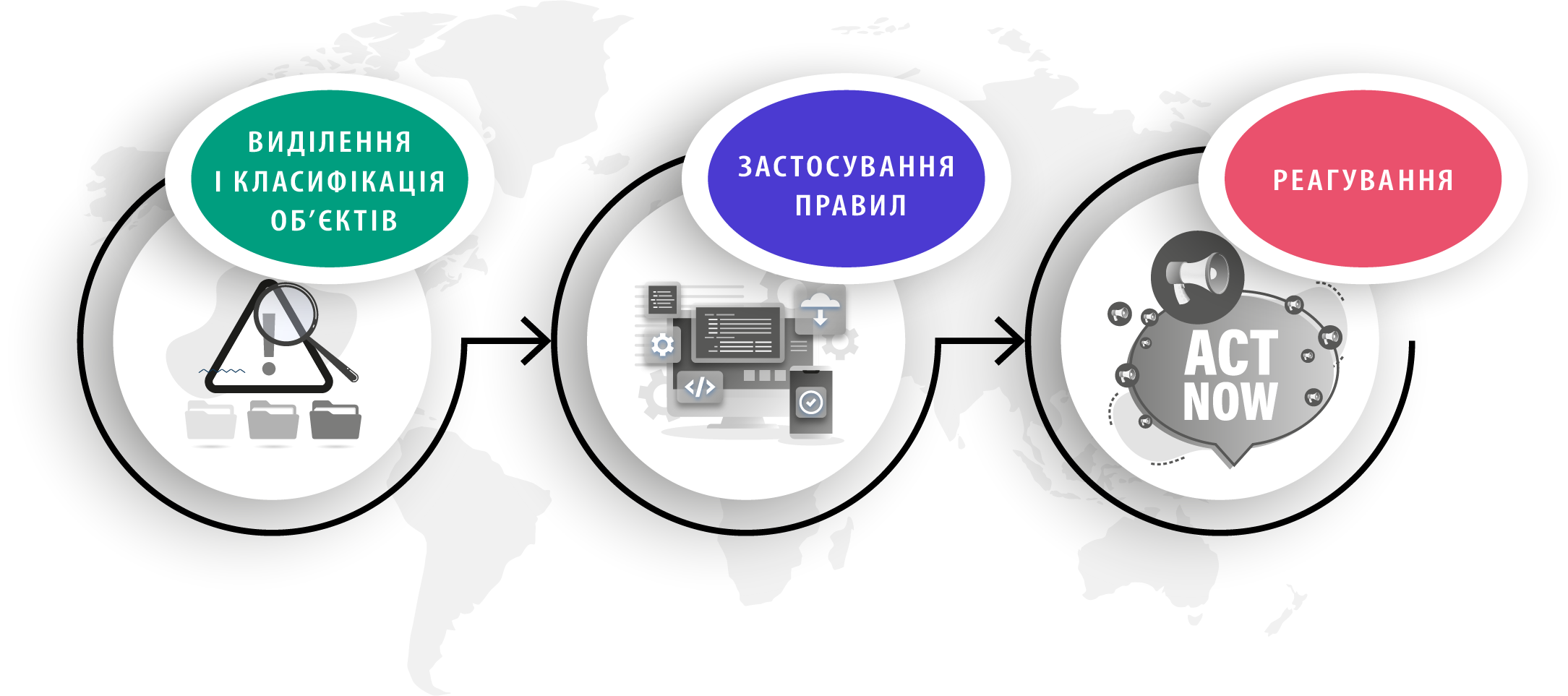
Мал. 1 Елементарна модель роботи алгоритму відеоаналітики
Якісна робота відеоаналітики потребує якісного зображення. Окрім відповідного освітлення (якому на периметрах почасти не приділяється багато уваги), відсутності оптичних завад в зоні відеонагляду (предметів, конструкцій, що заважають прямій видимості), важливим є й показник розподільчої здатності, що зазвичай вимірюється в пікселях на метр. Найкращі алгоритми здатні надійно виявляти і класифікувати об’єкти у відеоряді при щільності точок 120-130 піксель/м. При цьому, деякі виробники для спрощення прямо вказують дистанцію від точки фізичного розташування камери, на якій гарантовано надійне функціонування системи.
Нижче наведено три прикладні опції, що ілюструють сучасні можливості аналітичних інструментів у складі інтегрованих периметральних комплексів.
Опція 1: Попереджувальний рубіж
Концепція безпеки периметру об’єктів критичної інфраструктури зазвичай передбачає побудову глибокоешелонованої системи детекції, що включає кілька охоронних рубежів із застосуванням різних фізичних принципів. Почасти, однак, замовнику необхідно контролювати зовнішню територію, що безпосередньо прилягає до периметру, однак не є його власністю (а відтак немає можливості побудувати повноцінну огорожу). В таких випадках оптимальним рішенням може стати впровадження т.з. нульового, або попереджувального рубежу, основу якого складає відеоплатформа з аналітикою. Глибока інтеграція охоронної централі або комплексної системи управління безпекою з підсистемою відеонагляду дозволяє розпізнавати аналітичні метадані в якості стандартних детекторів, підключених на віртуальні зони. В той же час, потік з тих же камер продовжує використовуватись як відеопідтвердження отримуваних оператором тривог.

Класичним прикладом створення попереджувального рубежу може слугувати комбінація систем відеонагляду Avigilon (Канада) та інтегрованого комплексу безпеки ICT Protégé GX (Нова Зеландія). Відеоаналітика Avigilon здатна надійно виявляти такі класи об’єктів як: людина, легкове авто, вантажівка, автобус, мотоцикл, велосипед. Процес обробки даних та репрезентації їх користувачеві в цьому разі набуватиме наступного вигляду:


Мал. 2 Модель застосування аналітики як нульового рубежу
Охоронні централі Protégé (а також інші пристрої того ж класу) здатні сприймати віртуальні зони так само, як і фізичні, до яких підключено стандартні охоронні шлейфи.
Тобто, віртуальні зони:
а) можуть бути об’єднані в групи;
б) їх можна ставити і знімати з охорони за допомогою апаратних клавіатур (терміналів) чи з ПЗ;
в) їм можна призначати режими роботи (цілодобові, ізольовані і т.д.);
г) по віртуальних зонах можна генерувати необхідну звітність;
д) реакції на події у віртуальних зонах налаштовуються аналогічно фізичним.
Крім того, оскільки інтеграція аналітичних даних відбувається безпосередньо в централь, подібна архітектура є стійкою до аварійної відмови серверного застосунку Protégé GX, операційної системи чи апаратного забезпечення серверу. Всі події зберігатимуться в автономному режимі в пам’яті централі, а оператор здатен в повній мірі керувати нею з відповідного терміналу. Схематично структура такого комплексу представлена на Мал. 3:

Мал. 3 Структура комплексу охорони периметру з нульовим рубежем
Слід пам’ятати, що основною функцією нульового рубежу є привернення уваги оператора до подій, що класифіковані відеоаналітикою як «підозрілі» та такі, що потребують додаткової верифікації. Це допоміжний інструмент, що здатен зменшити кількість рутинних процедур, забезпечити контроль зовнішньої сторони основної лінії периметру і при цьому не впливати (на відміну від наступних двох опцій) на роботу сенсорів, побудованих на інших фізичних принципах.
Опція 2: Відеосинапс
Терміном «синапс» (грец. synapsis — з’єднання, зв’язок) в біології позначають спеціалізовану зону контакту між нейронами чи нейронами та іншими збудливими утвореннями, що забезпечує передачу збудження зі збереженням, зміною чи зникненням її інформаційного значення. Відповідно відеосинапс – це елемент комплексної системи безпеки, що забезпечує зміну попередніх налаштувань сенсорів, базуючись на інформації у відеопотоці. Іншими словами, в залежності від класу об’єкту, зафіксованого відеоаналітикою, та його поведінки у кадрі, відеосинапс оптимізує роботу периметральних детекторів. Як результат, знижується показник рейтингу хибних тривог при стабільно високій вірогідності детекції порушників.
Вдалим прикладом практичного застосування аналітики у формі відеосинапсу є рішення з логічною назвою Synapses від італійського виробника засобів детекції на периметрі CIAS.
Synapses являє собою мініатюрний сервер з вбудованими алгоритмами на базі згорткової нейронної мережі CNN та принципів глибокого навчання (Deep Learning), який здатний виявляти присутність у відеозображенні цілей певних класів, важливих для роботи системи охорони периметру: людина, собака, кіт, птах, легкове авто, вантажівка тощо. По кожній з виявлених цілей Synapses автоматично корегує значення тривожних порогів, асоційованих із заданою зоною аналітики периметральних детекторів. Наприклад, за умови виявлення та класифікації в кадрі об’єкту класу «тварина», система передає на підключений мікрохвильовий сповіщувач команду підвищити поріг чутливості для уникнення генерації хибної тривоги. В той же час, якщо потенційного порушника засобами відеоаналітики класифіковано як «людину», цей поріг знижується. Схематично роботу відеосинапсу представлено на Мал. 4:

Мал. 4 Модель функціонування відеосинапсу у складі комплексу охорони периметру
На практиці це означає наступне. Інсталяція традиційних аналогових периметральних детекторів завжди вимагала пошуку компромісу між чутливістю та кількістю хибних тривог. Якщо, згідно технічного завдання, необхідно надійно фіксувати мікрохвильовими сповіщувачами спроби проникнення на периметр перекатом або поповзом, то з високої вірогідністю детектор помилково генеруватиме тривогу і при русі в зоні дії різного роду тварин. І навпаки, якщо необхідно виключити хибні спрацювання на тварин, потенційний порушник, скоріше за все, зможе перетнути охоронну зону, наприклад, зігнувшись. Ця проблема до певної міри вирішувалась впровадженням цифрових технологій обробки первинних аналогових даних та застосуванням бібліотеки опорних сигналів (патернів), які характеризують ті чи інші види проникнення чи вплив природних/техногенних факторів. Порівняння фактично отриманого сигналу з масивом опорних дозволяє надійно виявляти задані цілі, не підвищуючи рейтинг хибних тривог.
Така технологія отримала назву «розмитої логіки» (Fuzzy Logic). Відповідно, поєднання алгоритмів Fuzzy Logic і відеосинапсу виводить якість роботи всієї системи на абсолютно новий рівень – баланс вірогідності детекції і хибних тривог завдяки інструментам відеоаналітики забезпечує досі недосяжну ефективність експлуатації всієї системи.
Пристрій Synapsis контролює один відеоканал від будь-якої камери з можливістю стримінгу форматі RTSP, в якому виділяється до 8 аналітичних зон. З кожною зоною можна асоціювати до 4 детекторів. Серед вже інтегрованих рішень доступні мікрохвильові моделі CIAS Murena Compact+, ERMO 482X Pro, Micro-Ray, а також вібраційний акселерометричний комплекс SIOUX. Комунікація з системами обробки даних верхнього рівня (охоронна централь, інтегровані системи управління безпекою) може здійснюватися через екосистеми збору даних по мережі IB-SYSTEM IP чи IB-SYSTEM-LITE.
В цілому, застосування відеосинапсу матиме найбільший ефект на складних ділянках периметру, де роботи алгоритму «розмитої логіки» може виявитися недостатньо через сильний влив різноманітних перешкод (неякісні рухомі огорожі, рослинність, об’єкти, що рухаються паралельно зоні детекції тощо), або в критично важливих зонах: контрольно-пропускні пункти, автомобільні і залізничні ворота, віддалені сегменти, інші місця з підвищеною небезпекою проникнення.
Опція 3: Синтез сенсорних технологій
Зазвичай обробка даних від кількох рубежів (включаючи нульовий), або від одного рубежу зі встановленими сенсорами на основі різних фізичних принципів здійснюється з використанням правил булевої логіки, тобто операторів типу AND, OR, XOR або NOR. Для випадків використання відеоаналітики такий підхід може бути оформлений наступними сценаріями:
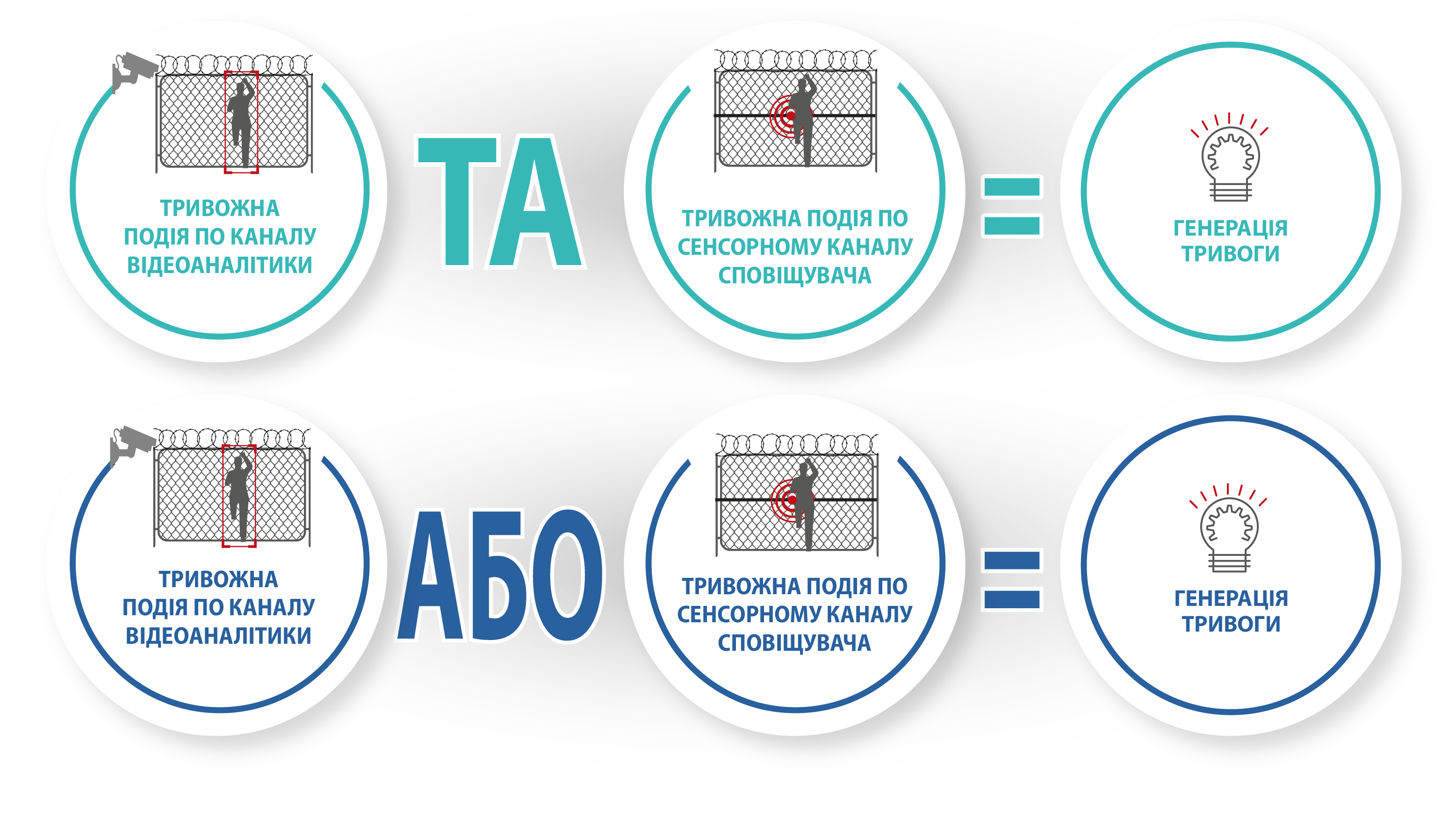
Мал. 5 Булева логіка обробки даних з кількох рубежів
Однак, подібна логіка здатна тільки мультиплікувати закладені в кожній з двох технологій недоліки, що в реальному житті не призводить до відчутного покращення показників вірогідності детекції і хибних тривог. Іншими словами, застосування глибокоешелонованої системи з кількома рубежами має сенс або в автономному режимі (коли кожен з них працює незалежно від інших), або за умови, що якийсь компонент системи здійснюватиме синтез даних з різних джерел на інтелектуальному рівні (з урахуванням таких змінних як час тривожної події, її місце та історичні показники роботи кожної з технологій).
Таким компонентом може слугувати рішення канадської компанії Senstar під назвою Sensor Fusion Engine. Воно також реалізується у формі мініатюрного серверу з підтримкою до 4 каналів відео (підключення камер за стандартом ONVIF), встановленими алгоритмами аналітики власної розробки, а також програмного забезпечення Network Manager, яке забезпечує передачу результуючих тривожних сигналів в системи верхнього рівня за стандартними протоколами, або через пропрієтарні інтеграції.

Наразі основним детектором, інтегрованим у Sensor Fusion Engine є вібраційний провідно-локаційний комплекс Senstar FlexZone.

Він являє собою комбінацію аналізатору з можливістю мережевого підключення і мідного сенсорного кабелю, що, завдяки використанню технології часової рефлектометрії (time domain reflectometry, TDR), здатен фіксувати спроби вторгнення з точністю до 1-2м.
Сутність ідеї синтезу технологій TDR і відеоаналітики краще показати на прикладах:
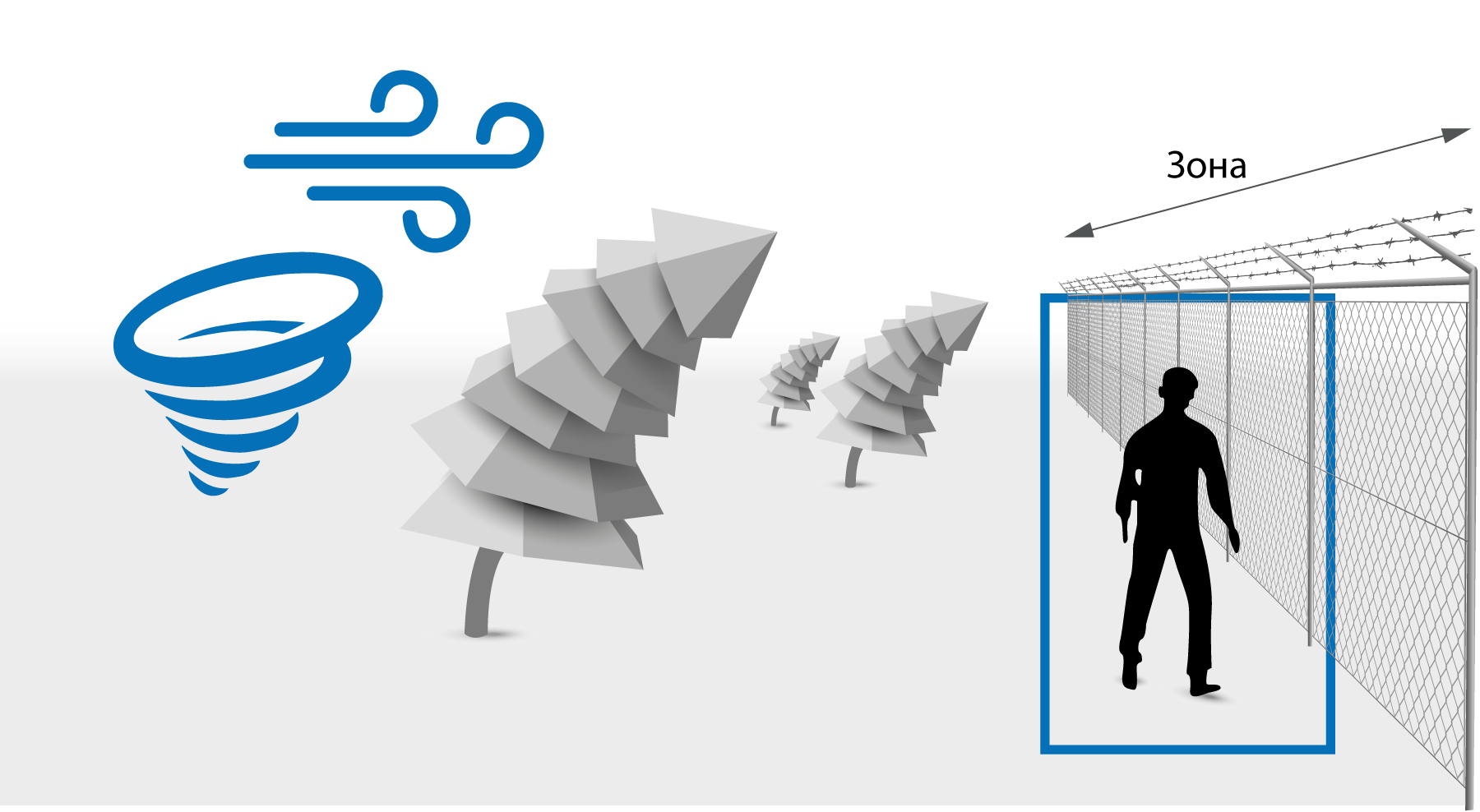
Сценарій 1Порушник намагається перетнути огорожу в зоні 1 в точці 30м. В той же час вітрове навантаження здійснює значний вплив на ділянки 10м, 20м і 40м тієї ж зони. В результаті система формує 4 тривожні події. При застосуванні оператора AND за правилами булевої логіки генерується 3 хибні тривоги і 1 коректна. При застосуванні алгоритмів Sensor Fusion, що визначає конкретне місце кожної події, генерується лише 1 коректна тривога.

Сценарій 2Людина (не порушник) переміщується вздовж зони 1. В той же час вітрове навантаження здійснює значний вплив на ділянки 10м, 20м і 40м тієї ж зони. В результаті система формує 4 тривожні події. При застосуванні оператора AND за правилами булевої логіки генерується 3 хибні тривоги, а при застосуванні оператора OR – 4. Алгоритм Sensor Fusion, не маючи співпадіння за місцем і часом тривожних подій, результуючих тривог не генерує.
Сценарій 3Підготовлений порушник намагається перетнути периметр за допомогою драбини, здійснюючи незначний (чи взагалі відсутній) вплив на огорожу. Контрзаходом в подібних випадках може бути встановлення додаткового піддашку з армованої колючої стрічки, або збільшення кількості проходок сенсорного кабелю на огорожі. При застосуванні оператора AND за правилами булевої логіки тривога не генерується (найгірший випадок), а при застосуванні оператора OR генерується 1 коректна.
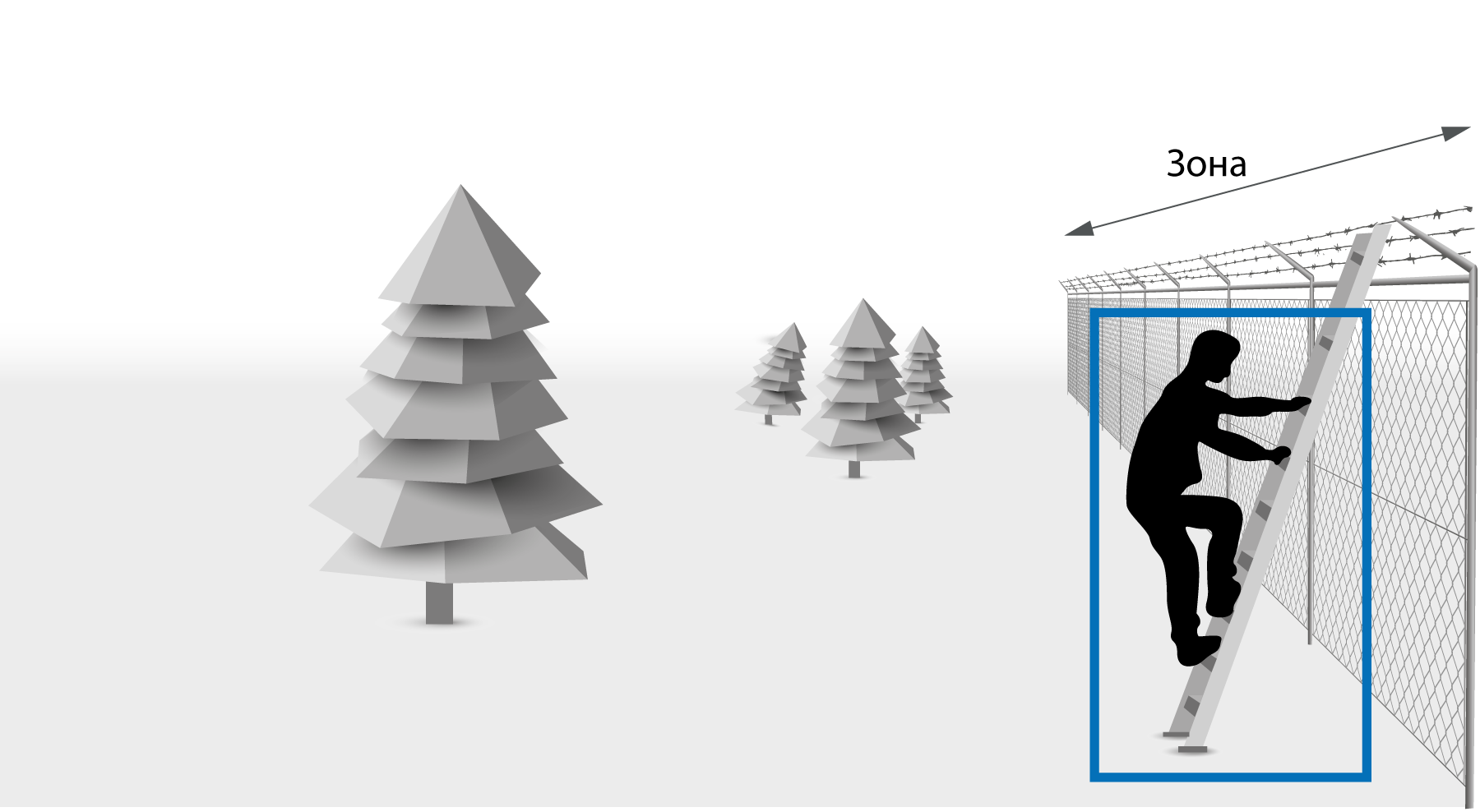
Алгоритм Sensor Fusion, динамічно переналаштовуючи ваги даних кожної технології, генерує 1 коректну тривогу.
Детальний розбір наведених сценаріїв показує, що використання логіки AND призводить до невиправданих ризиків: у випадку відсутності події по одній з технологій (через відмову обладнання чи мережі, або недостатнього рівня впливу на сенсор порушником), тривога буде пропущена взагалі. Використання логіки OR, в свою чергу, збільшує кількість хибних тривог. Sensor Fusion дозволяє досягти повноцінного синергетичного ефекту від комбінованої інсталяції пристроїв на базі обох технологій. Більше того, для запобігання некоректного функціонування внаслідок нечіткого відеозображення, виходу з ладу обладнання чи розриву мережевого з’єднання, система здійснює постійний моніторинг здоров’я периферії і комунікаційних каналів. Вона переключає пріоритети (ваги) тільки на аналітику чи вібраційний сенсор в аварійних ситуаціях, і відновлює синтез даних автоматично при встановленні штатної роботи. При цьому, співробітники експлуатації миттєво інформуються про всі аварійні події. Застосування Sensor Fusion є обґрунтованим у випадках, аналогічних відеосинапсу. Структурна схема побудови систем детекції на периметрі із використанням Sensor Fusion Engine представлена на Мал. 6:
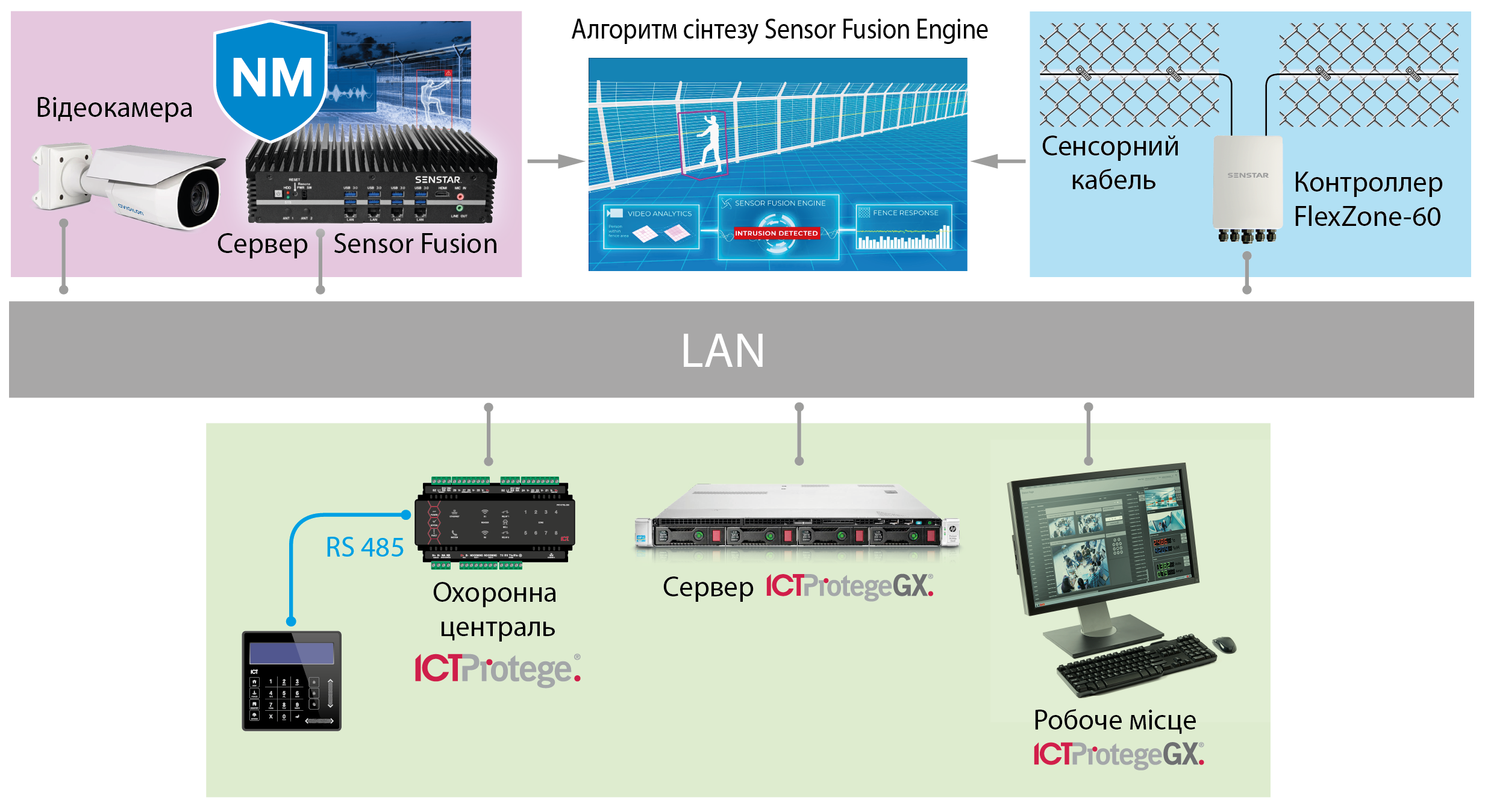
Мал. 6 Модель функціонування Sensor Fusion у складі комплексу охорони периметру
Наведені приклади доводять, що на сучасному етапі розвитку технологій нейронних мереж і штучного інтелекту, засоби відеоаналітики вже можуть ефективно використовуватись у складі комплексів охорони периметрів. Проте наразі вони відіграють скоріше допоміжну роль, підвищуючи ефективність експлуатації традиційних сенсорних систем в складних умовах чи на критично важливих ділянках. Про повну заміну всього масиву засобів детекції, що їх винайшло людство за останні півстоліття, алгоритмами і методами інтелектуального аналізу відеозображень, як і про відмову від оператора-людини на сьогодні не йдеться.